RCX programming / robot design tips | Robots I've designed | RCX bugs/issues
Robots I've designed
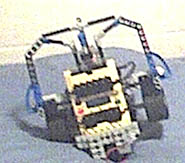
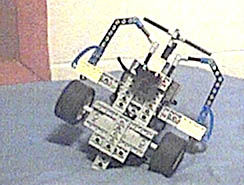
TestRoverbuilt 2/20/03, programmed 2/20/03My first chance to program a robot :) this swift little robot has 3 sensors, so it responds to being hit in the front and on the sides. It's just a test so it still doesn't do much... just runs around bumping into things and turning a bit. As far as programming, this code uses rover.c (in the demos directory of brickos) as a template, but most of the code is rewritten. Source Code: View Download (Test1) Images:
|


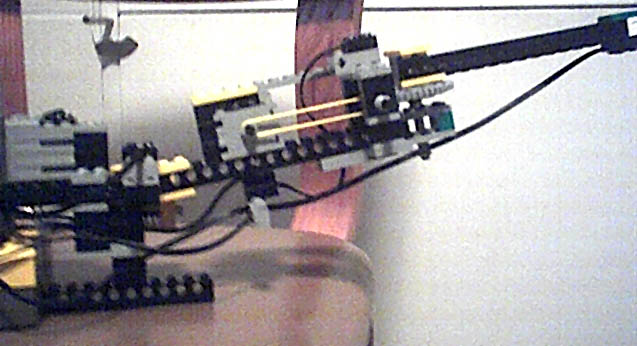
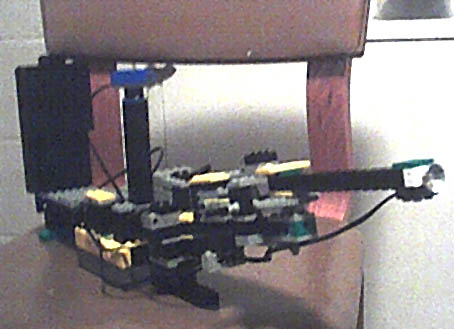
MirrorFinderbuilt 2/17/03, programmed (not yet)This is a big, klunky robot, who's proposed purpose is to find a mirror, but moving it's arm (with a light) around and determining where the light is greatest. Not really done yet. (why can I never go for the *simple* robots? - notice the VERY LARGE counterweight :D) This robot uses ALL of the wires in the kit and all but 1 light sensor. Update: I've decided to tear this one down in favor of starting with something simpler (and smaller....). Look for more here in the near future. Images:  
|